G-Mini at the CanSat Final
As explained in our last post, we, the G-Mini team from Collège Saint-Pierre in Uccle, participated in the CanSat competition, organised by the ESA, with the support of Eurocircuits for the production of our PCBs. The competition consists of the construction of a small ‘satellite’ in the shape of a soda can built by teams of 6 secondary school students. Afterwards, these teams are required to retrieve various data like pressure and temperature from said cans. Our secondary mission consisted of the ejection of 2 subcans from the main can to simulate real life space missions. We had the amazing opportunity to participate in the Belgian national final in Elsenborn on May 4th where we competed against 23 other teams after two selection rounds. We also managed to place 4th and won a distinction for our radio communication system. Here is a summary of our results…

1. Overview of the Flight
During the flight, we gathered 587 records from the main can, 371 from the first subcan and 338 from the second subcan, for a total flight duration of 80 seconds. Our RF-Transceiver lost the can’s signal a few seconds before our can landed, as expected. We received 95% of the data stored onboard while the RF link was active. During the flight, the rocket reached an apex at 789,9m from the ground, 15 seconds after the launch. Unfortunately, due to a last-minute issue (see below), our subcans were not able to eject from the main can.
The picture below represents the 3-dimensional trajectory of the main can, that we made thanks to the positioning information provided to us by the on-board GPS.
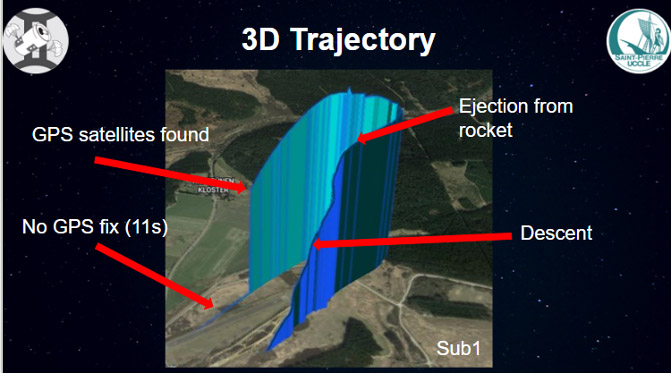
The blue trace represents the path of the main can during the flight phase. To optimize the battery autonomy, the GPS’s start only after takeoff detection and take a few seconds to obtain their fixes. This GPS, belonging to the first subcan, found its satellites 11 seconds after the launch.
2. Primary Mission
For the primary mission, we gathered temperature, pressure, and GPS data. From the pressure data, we could derive the altitude data.
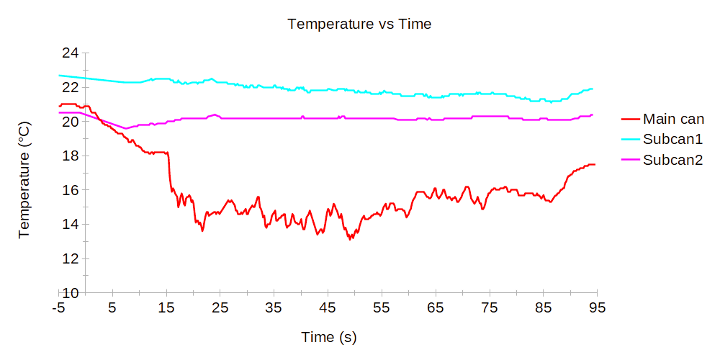
This is the temperature data collected by our 3 thermistors, on-board the main can and the2 subcans. In less than 3 seconds after ejection, the readings of our main can thermistor reach the actual air temperature and then increase again as the can descends. The subcan thermistors are almost stable, since the subcans were not ejected: they kept measuring the temperature inside the main can.

This is the altitude from take-off to landing: the subcans sensors have an initial delay during the ascent because the subcan compartments are almost air-tight. Apart this slight imperfection, the data from the 3 sources is perfectly consistent and shows that our parachute ensured a constant descent velocity within the specified range (8-12 m/s).
3. Secondary Mission
Like mentioned before, our subcans were unfortunately not able to eject, although the sensors properly detected the conditions required to trigger the ejection, and the software actually triggered it as expected.
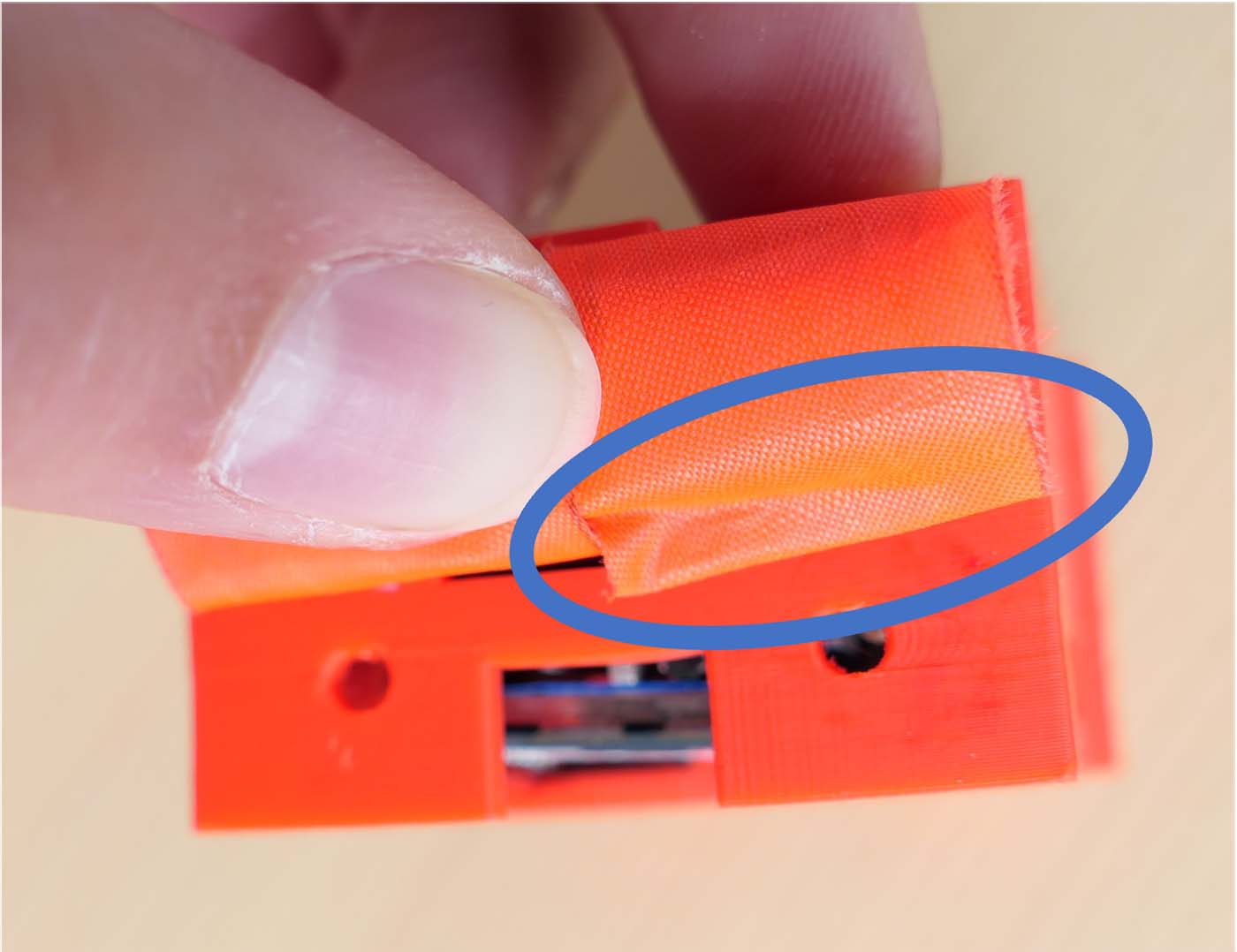
We triggered the ejection after the flight on the recovered can and it failed again. Somehow, the drawers were stuck.
We traced the problem back to a small fold of the parachute that blocked the ejection by adding excessive pressure on one of the locks. After learning this, we decided to fold the parachutes differently and that fixed the problem. This situation was difficult to prevent because this specific folding pattern had never occurred before. It’s unfortunate because it is so easy to avoid now we identified the problem.
4. Conclusion
This project proved that our architecture and design were adequate, but that we still have to improve the folding of our parachute and the reliability of the flight preparation procedure.
Our radio communication system worked very well, having received 95% of the cans transmissions on the ground. We even managed to broadcast our live telemetry on our website.


As for the subcans, we unfortunately were not able to foresee that such a minute thing as folding the parachute a certain way would hinder the ejection. Thanks to the tests performed afterwards, we are now able to avoid this problem. Ensuring that everything works flawlessly in the one and only flight is a pretty demanding requirement…
Thanks to this wonderful competition, we’ve not only been able to learn about the practical aspects of physics, but we’ve also been able to involve many people in our project inside and outside our school.
Be the first to read all about our news and information. Follow us on




